
El proyecto Erasmus+ no sólo tiene como objetivo un proyecto puramente profesional, sino también un intercambio internacional y el desarrollo personal de los participantes. Existe una cooperación transnacional con diferentes instituciones educativas, que crea y establece asociaciones. Los estudiantes tienen la oportunidad de viajar a países y ciudades menos conocidos. Adquieren conocimientos sobre la cultura del país y hacen amigos en toda Europa. Se hace gran hincapié en reforzar el artículo 2 del Tratado de la UE, que trata del pluralismo y la tolerancia. La digitalización de la formación profesional también puede contrarrestar problemas como el distanciamiento social a través de la RV y los medios de comunicación.
BS Horb a.N. – Alemania
Instrucciones para abrir una escena VR core en Unity para combinar con HP Reverb G2 (sólo en inglés)
Instrucciones paso a paso para transferir modelos CAD de SolidWorks a Unity
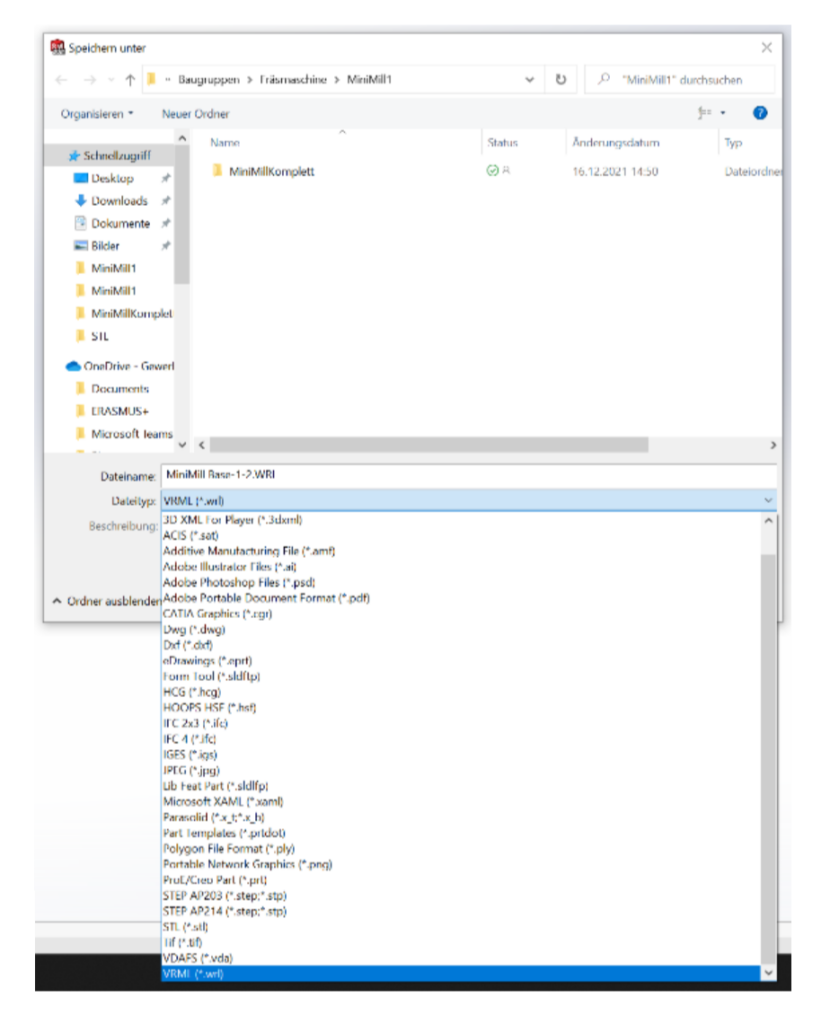
Para transferir el modelo CAD de SolidWorks a Unity, es importante guardar el modelo CAD en ensamblajes para que las piezas individuales estén disponibles en un solo archivo. Además, se requiere un programa especial (por ejemplo, “Stepper”).
Con este programa puedes guardar los ensamblajes como un archivo VRML (wrl.).
Si lo guardas como un archivo STL, puedes convertirlo en un archivo FBX (Unity) con la ayuda de un programa de conversión gratuito de internet. A continuación, puede importar este archivo FBX en Unity. El problema con este método es que sólo se puede mover todo el conjunto y no partes individuales.


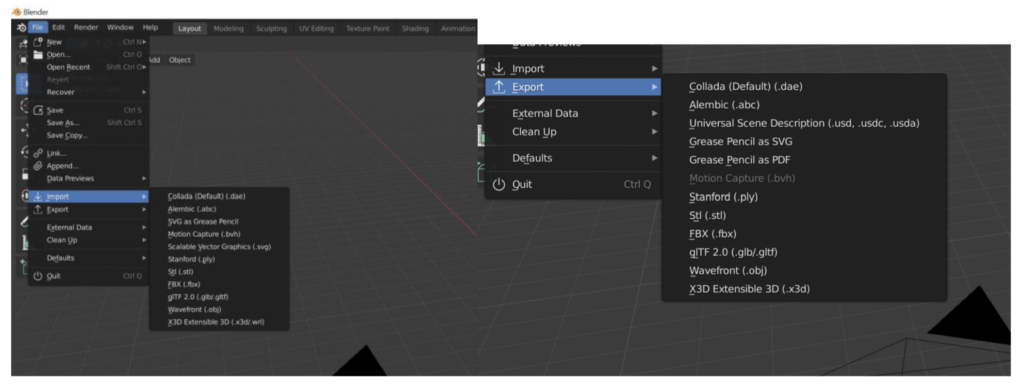
A continuación hay que importar el archivo VRML en Blender.
Un archivo FBX puede ser generado a partir de esto.
Este archivo FBX puede ser importado a Unity y ahora usted puede operar las partes individuales de la máquina CAD.
Vilnius College of Technologies and Design – Lituania
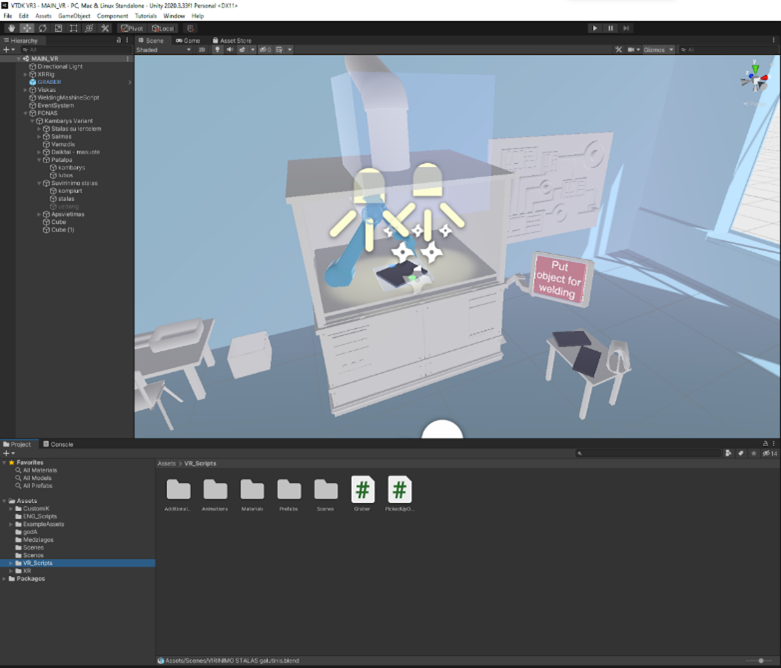
El proyecto de RV se creó utilizando una plantilla de RV en Unity.
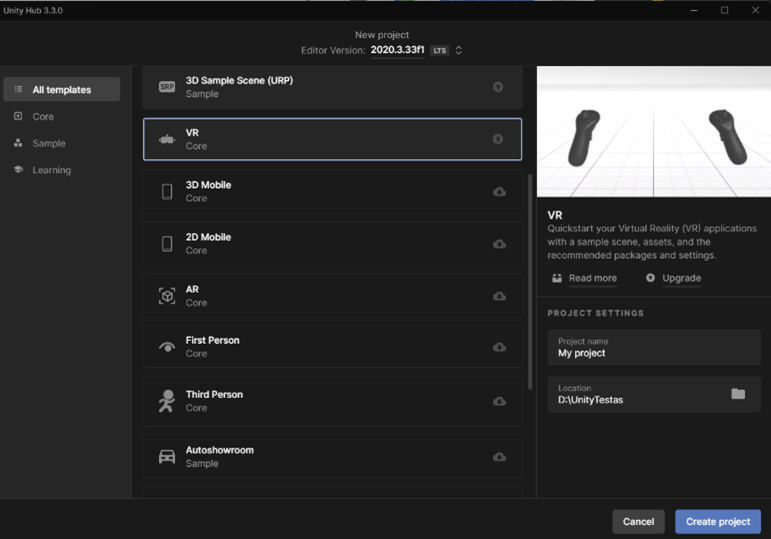
Esta plantilla contiene las herramientas necesarias para el paquete VR, por ejemplo ToolsForVrApp.
El paquete Unity también tiene scripts básicos preparados para la aplicación.
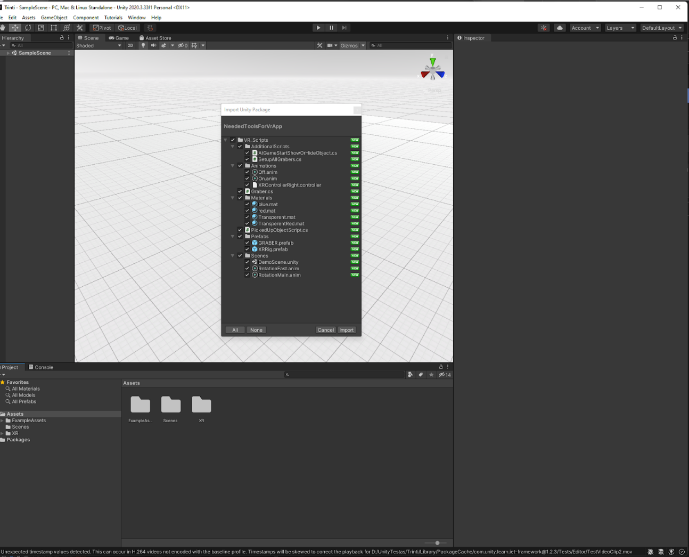
El GRABER prefabricado debe estar unido (subordinado) al controlador y la mano (izquierda o derecha) seleccionada.
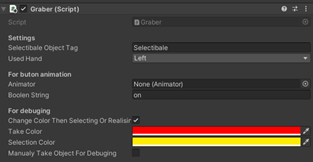
Script PickedUpObjectScript.cs debe adjuntarse al objeto que desea recoger.
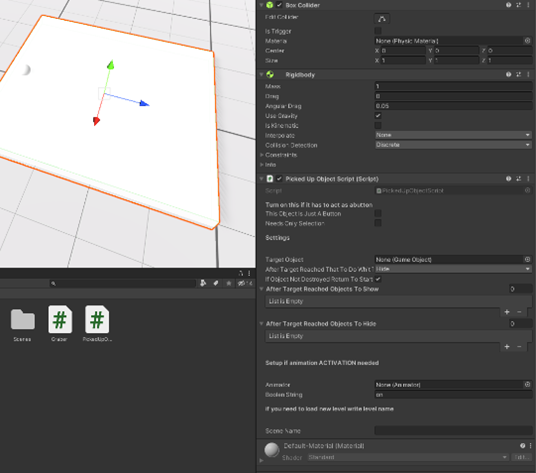
Con este script se puede crear una lógica de juego. Los objetos necesarios pueden ocultarse o difuminarse.
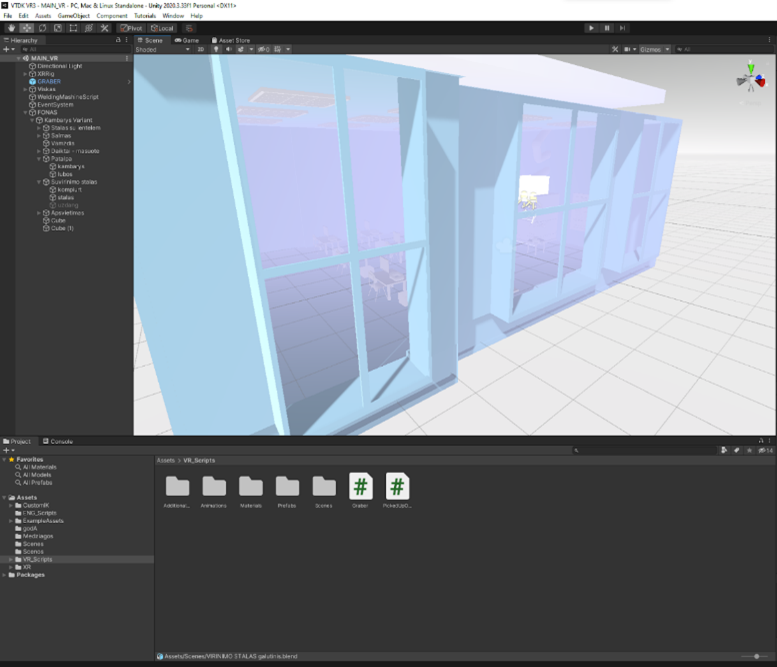
Resultado (los modelos fueron preparados/creados con el programa Blender)
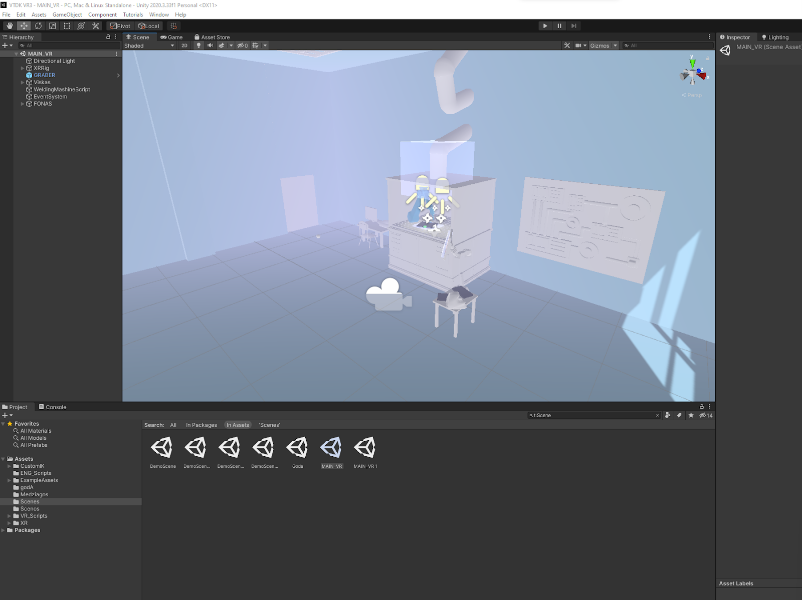
Resultados del proyecto lituano
Siga el enlace del paquete de trabajo para repetir el proceso.
Se ha desarrollado un método para fabricar este tipo de productos. Todos los pasos se simplifican para evitar la programación y, aun así, se pueden ensamblar situaciones complejas.
Rzeszow University of Technology (PRz) – Polonia
El proceso de mecanizado en realidad virtual se desarrolla del siguiente modo. Tras iniciar la aplicación, el usuario es guiado a una sala con una mesa, una materia prima, herramientas y una máquina CNC. Cada paso necesario para que el usuario progrese aparece resaltado. La primera tarea consiste en acoplar la herramienta al mango. El usuario debe coger la herramienta correcta e insertarla en el mango adecuado. Si el paso se realiza correctamente, las piezas se fusionarán. El siguiente paso es colocar el mango con la herramienta en la cámara de la máquina CNC. El operario debe agarrar el mango y colocarlo en la zona marcada de la máquina (avance de la herramienta). Una vez colocada la herramienta en la cámara, hay que añadir la materia prima. Se trata de un material sin mecanizar que se encuentra sobre la mesa. El usuario debe agarrarla y colocarla en el soporte correspondiente de la máquina CNC (Fig. 1).
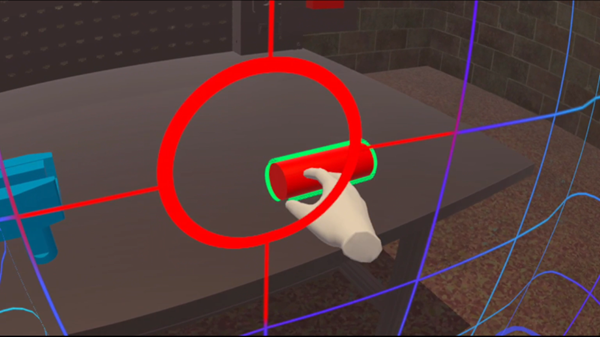
Fig. 1 – Materia prima
Una vez completado el paso, se ilumina la puerta que debe cerrarse manualmente. Si la puerta se ha cerrado correctamente, se inicia una animación de la primera parte del proceso. Con esto se completa el primer paso de la formación. El segundo paso consiste en mecanizar la otra cara de la materia prima. El operario debe abrir la puerta de la máquina CNC y colocar otra herramienta en la segunda ranura del alimentador de herramientas. Del mismo modo, la herramienta y el mango deben conectarse y colocarse previamente en la cámara. Cuando el operario ha completado la operación, el contorno de la puerta se ilumina y permite que se cierre. Una vez cerrada la puerta, se reproduce la segunda animación que muestra el resto del proceso de mecanizado (Fig. 2).
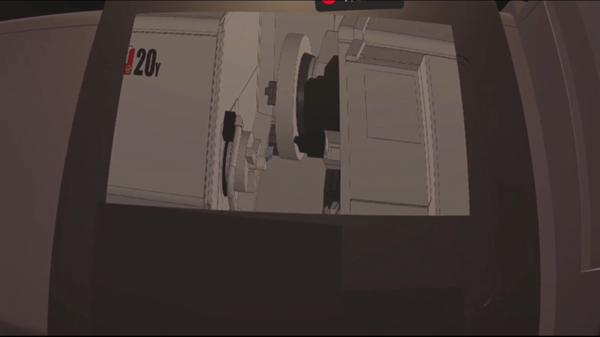
Fig. 2 – Segunda animación
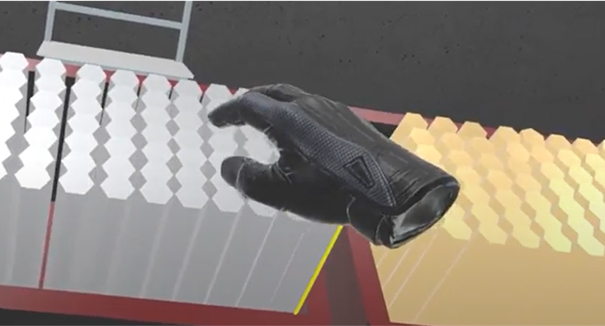
Una vez finalizada la animación, se puede abrir la puerta. El operario puede retirar la pieza acabada y verla de cerca (Fig. 3).

Fig 3 – Componente acabado
Al retirar la pieza terminada finaliza el escenario de entrenamiento. El usuario puede reiniciar el escenario pulsando el botón de reinicio situado encima de la mesa.
IES MOLÍ DEL SOL – España
- Definición de la pieza a fabricar
- Estudio de las máquinas a utilizar
- Elaboración escrita de la secuencia para tener todos los pasos
- Definición de las interacciones necesarias
- Búsqueda en las bibliotecas de objetos estándar (sillas, mesas, máquinas, etc.)
- Dibujar el aula en CAD
- Traducir este archivo a .obj y .fbx
- Crear vídeos a partir de la secuencia


Technical School Osijek – Croacia
Para crear nuestro programa, primero descargamos Unity Hub e instalamos todos los plugins necesarios. Para poder lanzar nuestro proyecto en nuestro casco de realidad virtual, tuvimos que instalar el SDK de Android. A continuación, tuvimos que instalar el kit de herramientas de interacción XR, activar Quest 2 en la plataforma y cambiar la plataforma a Android en los ajustes de compilación.
Después de configurar Unity para que fuera compatible con nuestro casco de realidad virtual, empezamos a trabajar en la cámara y los controladores de realidad virtual. Para ello, utilizamos el preajuste de origen XR que viene con el preajuste de cámara para el casco. A continuación, añadimos los mandos y sus modelos, junto con las funciones para agarrar objetos con el botón de agarre y moverse con los joysticks.
Para diseñar el aula, medimos el aula y la diseñamos en 3DS CATIA V5. Después utilizamos el exportador CAD para importar los archivos Catpart en archivos .obj que necesitábamos para poder exportarlos a Unity.
Tuvimos que añadir materiales a la malla, junto con los componentes de cuerpo rígido y colisionadores.
Algunos de nuestros objetos en el espacio están creados en Unity o en software de modelado por nosotros mismos, pero no todos. Importamos algunos de los modelos de sitios web como GrabCAD, SketchFab y otras bibliotecas de modelos. Hubo que añadir un material a cada objeto. Para añadir la capacidad de agarrar y sujetar objetos, también tuvimos que añadir colliders y cuerpos rígidos, pero también el XR Grab Interactable.
Para hacer la máquina, tuvimos que crear o importar un modelo y escribir scripts para mover los ejes X, Y y Z. Como nuestro modelo fue descargado, también tuvimos que separar las puertas del chasis principal de la máquina en Blender. Los scripts se escribieron en el software Microsoft Visual Studio utilizando el lenguaje de programación C#.
Algunas cosas en las que todavía tenemos que trabajar son las animaciones para el proceso de mecanizado, las funciones para cerrar y abrir la puerta de la máquina y la capacidad de agarrar la manija de la puerta, la colisión del modelo del jugador y las funciones para convertir la materia prima en el producto terminado.